BFS 로 길찾기 가능하지만 간선 별로 가중치가 없을 때에 최적의 경로를 찾는 것이다. 간선 별 가중치에 따라 이동 시간이 늘어난다고 하였을 때에는 다익스트라 길찾기 쓴다.
목적지는 딱히 의미가 없고, 시작 노드로부터 각 노드까지의 최소 비용을 찾는 알고리즘이다.
각 노드 별로 탐색 시에 해당 경로까지의 비용을 갱신한다.

위의 3번 노드는 처음 35 비용이 저장되지만, 0 → 1 → 3 으로 탐색 되어질 때 25비용으로 갱신된다.
// BFS 로 길찾기 가능하지만 간선 별로 가중치가 없을 때에 최적의 경로를 찾는 것이다.
// 간선 별 가중치에 따라 이동 시간이 늘어난다고 하였을 때에는 다익스트라 길찾기 쓴다.
// 목적지는 딱히 의미가 없고,
#include <iostream>
#include <queue>
#include <vector>
#include <list>
using namespace std;
struct Vertex
{
// int data;
};
vector<Vertex> vertices;
vector<vector<int>> adjacent;; // 인접 행렬
void CreateGraph()
{
vertices.resize(6);
adjacent = vector<vector<int>>(6, vector<int>(6, -1));
// 간선 연결 및 가중치 설정
adjacent[0][1] = 15;
adjacent[0][3] = 35;
adjacent[1][0] = 15;
adjacent[1][2] = 5;
adjacent[1][3] = 10;
adjacent[3][4] = 5;
adjacent[5][4] = 5;
}
void Dijkstra(int here)
{
// 구조체로 해도 되고 std::pair 로 해도 되고
struct VertexCost
{
int vertex;
int cost;
};
// BFS 에서는 queue 로 관리했다. 이유는 먼저 발견한 순서대로 탐색해야했기 때문이다.
// 그러나 이제는 먼저 발견했다고 먼저 탐색하는 것이 아니기 때문에
// list 혹은 다른 자료구조로 관리한다.
list<VertexCost> discovered; // 발견 목록
vector<int> best(vertices.size(), INT32_MAX); // 각 정점별로 지금까지 발견한 최소 거리
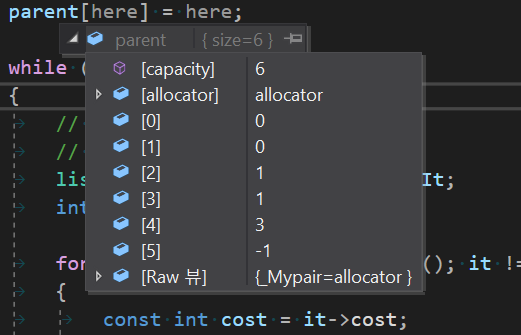
vector<int> parent(6, -1);
discovered.push_back(VertexCost{ here,0 });
best[here] = 0;
parent[here] = here;
while (discovered.empty() == false)
{
// 제일 좋은 후보를 찾는다.
// list 를 이용해서
list<VertexCost>::iterator bestIt;
int bestCost = INT32_MAX;
for (auto it = discovered.begin(); it != discovered.end(); it++)
{
const int cost = it->cost;
// 현재 찾는 코스트가 더 낮은 비용이면 bestCost 갱신
if (bestCost > cost)
{
bestCost = cost;
bestIt = it;
}
}
//
int cost2 = bestIt->cost;
here = bestIt->vertex;
discovered.erase(bestIt);
// 방문. 더 짧은 경로를 이미 찾았다면 스킵
if (best[here] < cost2)
continue;
//
for (int there = 0; there < 6; there++)
{
// 연결 안되어 있으면 스킵
if (adjacent[here][there] == -1)
continue;
// 더 좋은 경로를 과거에 찾았으면 스킵
int nextCost = best[here] + adjacent[here][there];
if (nextCost >= best[there])
continue;
best[there] = nextCost;
parent[there] = here;
// {3,35} {3, 25} 가 2번 들어간다.
discovered.push_back(VertexCost{ there, nextCost });
}
}
// 디버깅용 더미 데이터
int a = 3;
}
int main()
{
CreateGraph();
Dijkstra(0);
}
디버깅 결과
시작 노드에서 각 노드까지의 최단 비용

시작 노드에 각 노드까지의 최단 비용일 때에 각 노드와 시작 노드 사이에 경로
'자료구조 알고리즘' 카테고리의 다른 글
| 이진 탐색 (0) | 2024.05.30 |
|---|---|
| 길찾기4 A* 알고리즘 (0) | 2024.05.29 |
| 길찾기2 BFS 를 이용하기 (0) | 2024.05.29 |
| 길찾기 1 우수법 (0) | 2024.05.29 |
| 레드 블랙 트리 (1) | 2024.05.29 |
